天游线路检测中心探针显微镜
什么是天游线路检测中心探针显微镜
天游线路检测中心探针显微镜SPM是显微镜的总称,它是在IBM的Binnig等人于1981年开发的天游线路检测中心隧道显微镜(STM)的基础上演变成各种形式的。
SPM主要用作观察样品表面形貌的显微镜,但由于它可以精确地将表面凹凸形状(高度)捕获为数值,因此也用作表面粗糙度检查和测量装置。此外,它还用于使用先进探针对原子进行“位置操纵”和“纳米级处理”。 SPM 不断发展成为一种力显微镜,不仅可以成像表面粗糙度信息,还可以成像摩擦、粘弹性、磁性和表面电势等各种信息。
在这里,我们将介绍天游线路检测中心探针显微镜(SPM)的设备概述和原理,以及SPM在各个领域的观察和测量示例。
SPM的起源STM仅限于观察导电金属和半导体等物体,但自从1986年推出可用于无机、有机和生物样品(无论是否导电)的原子力显微镜(AFM)后,SPM的使用范围显着扩大。
天游线路检测中心探针显微镜概述
天游线路检测中心探针显微镜的分辨率和对比度
图1 显微镜分辨率比较
SPM 发明于 1982 年。在此之前,表面和结构观察主要使用透射电子显微镜 (TEM)、天游线路检测中心电子显微镜 (SEM) 和光学显微镜 (OM) 进行。图1显示了SPM与SEM、TEM和OM的分辨率比较,这表明SPM作为显微镜具有广泛的应用。
SPM主要进行样品表面的实空间观察(三维结构观察),因此获得的图像信息与SEM图像类似。然而,SPM的水平分辨率高达014 nm,可以在普通SEM无法实现的原子分辨率区域进行观察。从这一点来看,SPM的分辨率达到了高分辨率TEM的水平,但样品评估的角度不同,SPM观察样品表面的真实空间图像,而TEM则使用透射电子束观察薄膜体(固体内部的平均结构)的相差。
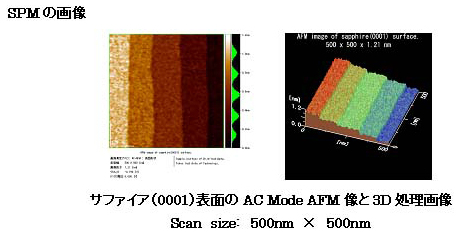
图2 SPM图像显示格式
此外,SPM的一大特点是,它将观察到的样品表面形状的高度方向上的信息显示为对比度,并将其记录为数值信息。 SPM具有001 nm的优异垂直分辨率,这是SEM或TEM无法获得的信息。图 2 是 SPM 图像的示例。左侧的图像显示为二维图像,但具有显示“亮度与高度”的比例。它还可以根据高度数据显示为 3D 图像,如右图所示。
天游线路检测中心探针显微镜的操作环境
使用电子束的 SEM/TEM 必须在高真空下操作才能确保高分辨率。另一方面,SPM的工作环境范围广泛,可以在空气、真空、气体氛围、液体等各种环境中使用,只要探针尖端与样品表面之间能够发生相互作用。因此,期望有一种能够满足各个领域以更自然的状态观察表面形状的需求的装置。一般来说,最容易在大气中使用,但测量也会在各种环境中进行,例如在高真空或超高真空下清洁表面、在液体中对表面进行化学处理,甚至加热和冷却。
天游线路检测中心探针显微镜所需的组件
简单地说,天游线路检测中心探针显微镜的操作是“天游线路检测中心探针并追踪表面形状”。实现此行为需要三个重要组件:
探针
3D天游线路检测中心仪(3D天游线路检测中心元件)
伺服技术
如果您了解这些单独元素的工作原理,就会更容易理解 SPM 的工作原理。
极其锋利的“探针”
为了澄清与电子显微镜中的电子探针的区别,我在这里特意将其称为固体探针。 SPM中的探针是如图3所示的针状探针,也称为探针或尖端。尽管STM和AFM所用探针的外形和材料不同,但均采用电解抛光和硅干法刻蚀等方法进行制造。在这两种情况下,探针尖端的曲率半径约为 10 nm。该探针的尖端起着获取通过其所面对的样品表面部分的相互作用而获得的信息的作用,并且尖端的形状影响分辨率。对于AFM,探针形成在称为悬臂梁的板簧尖端,如图4所示。悬臂梁距固定端的长度约为100μm至200μm,弹簧常数为10-9它具有约N/m的小型且灵活的结构,主要由硅或氮化硅制成。
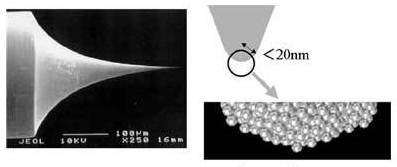
图 3 SPM 探针
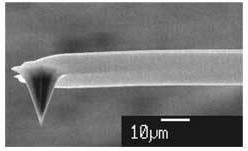
图 4 探头和悬臂
使用“3D 天游线路检测中心仪(3D 天游线路检测中心元件)”进行机械天游线路检测中心
SPM 只是将探针尖端和样品表面彼此靠近并进行机械天游线路检测中心,并且没有像 SEM 那样的电磁透镜或偏转器。然而,为了获得与样品表面的相互作用,探针尖端与样品表面之间的距离必须精确地保持在1 nm或更小。由压电元件(piezo elements)组成的3D天游线路检测中心仪(3D天游线路检测中心元件)用于保持该位置精度。
压电元件是电子打火机点火装置中使用的常见材料,电子打火机利用正压电效应。这种正压电效应使用锤子对元件的晶体进行机械应变,在元件上相对的点极之间产生极化电位差并引起放电。压电致动器利用了这种效应。当在相对的电极之间施加高电压时,根据元件的特性,会发生诸如垂直、水平或滑动等晶体变形,并且根据所施加电压的极性,会发生伸长或收缩变形。这些元件的组合构成了 3D 天游线路检测中心仪(3D 天游线路检测中心元件)。这里我们将以 SPM 中使用的典型 3D 天游线路检测中心仪为例进行说明。 SPM中使用的压电陶瓷元件由烧结铁电材料制成,具有如图5所示的圆柱形形状。元件的整个内部金属化有接地电极(0V),外表面金属化有五个分开的电极(X1、X2、Y1、Y2、Z)。
图 5 3D 天游线路检测中心仪配置
整个元件的特点是,当相对于接地电极(0V)向外部电极施加正电压时,元件会膨胀,而当施加负电压时,元件会收缩。因此,如果在支撑圆柱体底端的同时向X1和X2施加相反极性的电压,则X1电极的材料将膨胀,X2电极的材料将收缩,并且整个元件将弯曲。圆柱体顶端的位移量(天游线路检测中心宽度)由圆柱体的长度和施加的电压决定。驱动期间施加的天游线路检测中心信号与施加到SEM的静电偏转器的信号大致相同,但是通过施加从几伏到约200V的电压来实现从1nm到几十微米的天游线路检测中心。
这样,通过向X和Y电极施加天游线路检测中心信号就可以进行二维天游线路检测中心,但是SPM天游线路检测中心仪配备了Z电极,Z电极在操作中起着最重要的作用。围绕该尖端的整个圆周设置的电极元件响应于所施加的电压而在Z方向上实现约10nm/V的极小的膨胀和收缩。 Z 电极在反馈电路系统内驱动,该反馈电路系统控制探针和样品之间的微小距离,这将在稍后描述。
伺服技术(反馈控制)
伺服技术在控制探头与样品之间的距离方面发挥着重要作用。
伺服技术(反馈控制)是一种用于操作电气设备、机械等同时纠正与目标的偏差的控制技术。
图6反馈电路
如果你想象一下飞机的自动驾驶仪例如,如果你发出命令自动驾驶仪以匀速飞向目标位置,同时保持与地面的距离,飞机会依次参考高度计和雷达来测量与地面的距离,当高度增加时,它会通过操纵杆调整襟翼来下降,如果有一座山接近航线,它会上升到预定的高度以预测接近速度
SPM天游线路检测中心以及样品表面与探头之间的距离控制操作也有类似于飞机自动驾驶仪的空间运动。如图6所示,SPM有一个电路,可以从隧道电流和原子力等物理量中检测探针和样品之间的距离,并将其反馈到3D天游线路检测中心仪的Z电极作为距离控制电压。虽然我们不会在这里讨论这一点,但为了让SPM以亚纳米精度进行这种控制,已经充分考虑了降低每条信号线中的噪声以及抑制来自系统内部和外部的振动。
原子力显微镜“AFM”的工作原理
AFM 可以在不考虑样品电导率的情况下进行测量,因此近年来它比 STM 的使用频率更高。此外,AFM配备了多种测量模式,例如摩擦力显微镜(FFM)、微粘弹性显微镜(VE-AFM)、磁力显微镜(MFM)和表面电位显微镜(SKPM)等衍生测量方法,因此此类信息在各个领域也变得越来越重要。
现在,我们具体解释一下 AFM 是如何配置的。首先,图 7 显示了 AFM 最基本的配置。 AFM 被配置为通过悬臂的偏转来检测作用在探针和样品表面之间的原子间力(吸引力和排斥力),并使用位置检测器来检测照射在悬臂尖端上的激光束的反射点。该光学检测系统采用“光学杠杆法”,通过放大并投影到检测器上来检测悬臂的微小位移。作为检测器,使用图7所示的分体式检测器,通过运算电路计算A、B的检测信号量之差(A-B),从而得到位置信息。换句话说,如果悬臂的尖端上下移动并且反射点的位置发生偏移,则检测信号量差(A-B)的计算结果将会改变。误差放大器接收该结果,并将与基准位置的误差最小化的输出发送至压电元件驱动电源(Z驱动部)。通过该反馈电路,例如,当悬臂向上位移时,Z压电元件收缩,使悬臂返回到其原始位置。这样,AFM 在反馈控制下天游线路检测中心样品表面,使针尖和样品之间作用的原子力保持恒定,并根据将 Z 驱动电压转换为距离获得的数据对不均匀信息进行成像(图 8)。
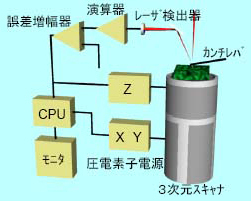
图7 AFM的基本配置
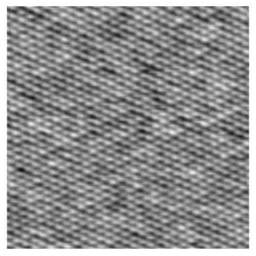
图8 MICA表面的AFM图像
原子力显微镜“AFM”测量模式
原子力显微镜测量模式
目前,除了接触式AFM之外,AFM还有多种测量模式和检测方法,但每种模式和检测方法都有其优点和缺点,具体使用取决于待测物体的表面状况和检测信息。
AFM测量方法大致可分为“接触模式”和“AC模式”,利用样品表面与针尖之间的原子斥力进行观察和测量,以及“非接触模式”,检测样品表面与针尖之间的原子吸引力。
接触模式 AFM
交流模式 AFM
非接触模式 AFM
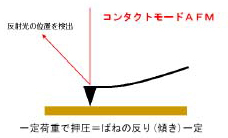
图 9 接触模式 AFM
接触模式AFM,如图9所示,是一种使用弹簧常数较小的软悬臂以恒定的力接触尖端的同时进行天游线路检测中心的模式。具有固定弹簧常数的悬臂尖端响应于所施加的力而近似线性位移,因此该位移是从照射在悬臂尖端上的激光的反射点的位置检测到的。然后通过天游线路检测中心测量表面的不规则性,同时通过反馈控制Z压电元件,以保持该位置(悬臂倾斜)恒定。实际测量中,通过将探针与样品接触时的压力调整到最弱,在原子斥力区域实现接触。然而,由于针尖始终以恒定的力与样品接触,因此在观察有机材料或生物样品等软样品时存在破坏表面的可能性,因此在选择悬臂梁时必须加以考虑。
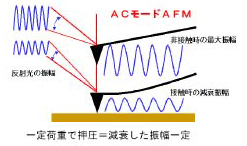
图 10 AC 模式 AFM
AC 模式 AFM 通过使悬臂尖端与样品接触,同时强制振动(如图 10 所示),并在通过反馈控制 Z 压电元件以保持振动幅度恒定的同时进行天游线路检测中心,来测量表面不规则性。悬臂由构建在悬臂基板固定部分上的压电元件(振荡器)振动。当悬臂尖端与样品接触时,振动幅度将根据压力而衰减。这种衰减作为负载施加到样品上,但与样品始终以相同强度接触样品表面的接触模式相比,周期性施加力的交流模式可以在较少损伤的情况下进行表面观察。因此,AC模式AFM可以应用于广泛的样品,从有机材料和生物样品等软样品到硬样品。
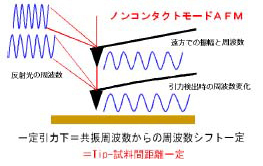
图 11 非接触模式 AFM
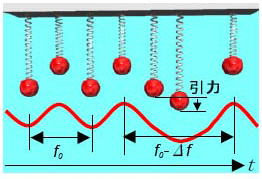
图12 悬架弹簧简谐模型
非接触模式 AFM 通过天游线路检测中心测量表面不规则性,同时反馈控制 Z 压电元件,以保持探针和样品之间作用的“原子吸引力”恒定。 AC模式AFM以接近悬臂固有频率的频率强制振动悬臂,而非接触模式AFM则使用自振荡方法使悬臂振动,如图11所示。本来,即使没有施加振动,悬臂也会以其固有频率振动,并且可以用光杆光学系统检测到这种振动。自激振荡法将检测到的信号的频率成分反馈给悬臂梁的激励元件,以增加激励,只要悬臂梁的自由振动不受调节,振荡就会持续下去。
非接触模式 AFM 通过固有频率的频率变化检测吸引力。如图 12 所示的悬架弹簧的简谐波模型,当施加吸引力时,振动周期变得比基波振动长(频率变低)。非接触模式AFM的反馈电路通过天游线路检测中心Z压电元件来执行表面不规则性的非接触测量,同时反馈控制它以保持该频率恒定。